
作者:黄兴 陈珺 刘飞
单位:江南大学轻工过程先进控制教育部重点实验室
引用本文:黄兴, 陈珺, 刘飞. 非高斯噪声条件下的锂电池鲁棒SoE估计[J]. 储能科学与技术, 2025, 14(11): 4370-4380.
DOI:10.19799/j.cnki.2095-4239.2025.0526
本文亮点:一、采用相较于同类算法收敛速度更快,计算量更小的沙猫群优化算法(SCSO)进行等效电路模型参数辨识; 二、在容积卡尔曼滤波CKF中引入最大相关熵准则,用学生t核函数替代传统高斯核函数,采用多核参数策略计算误差权重矩阵,提出改进学生t核最大相关熵卡尔曼滤波进行SoE估计,可以在实际应用中充分利用非高斯噪声中的高阶信息和增强对不同分布特性的非高斯噪声的处理能力; 三、定义由高斯混合噪声、散粒噪声、均匀混合噪声和拉普拉斯噪声组合的混合噪声环境,基于多温度的FUDS工况数据进行对比分析,研究了所提算法在不同程度和不同类型的非高斯噪声环境下算法的估计精度、适用性和鲁棒性。
摘 要 针对现阶段锂电池能量状态(SoE)估计在非高斯噪声干扰下精度不高、难度大的问题,提出一种基于改进学生t核最大相关熵容积卡尔曼滤波(ITMCCKF)估计方法。首先,为快速准确获取等效电路模型参数,采用沙猫群优化算法(SCSO)进行模型参数辨识。然后,采用容积卡尔曼滤波(CKF)解决非线性估计误差问题,在此基础上引入最大相关熵准则,用学生t核函数替代传统高斯核函数,以充分利用非高斯噪声中的高阶信息。设置不同核参数计算误差权重矩阵,以增强对不同分布特性的非高斯噪声的处理能力,提高估计的准确性。最后,定义由高斯混合噪声、散粒噪声、均匀混合噪声和拉普拉斯噪声组合的3种噪声环境,基于2种温度(常温和0 ℃)下的FUDS、US06、BJDST工况数据进行测试。实验结果表明,与MCCKF算法相比,所提算法在常温时3种噪声环境下各工况的平均均方根估计误差分别降低了50.2%、53.8%、52.8%,在0 ℃时分别降低了50.4%、61.0%、64.1%,验证了所提算法在非高斯噪声环境下具有较好的适用性和鲁棒性。
关键词 锂电池;参数辨识;能量状态;最大相关熵准则;容积卡尔曼滤波
根据国际能源署报告,电动汽车在2024年的销量接近1700万辆,增长超25%。锂离子电池由于具有能量密度高、自放电率低、无记忆效应和使用寿命长等特点,被广泛用作电动汽车的动力源。为准确把握电动汽车的续航里程,提高能量利用效率以及优化电池管理系统的工作模式,电池能量状态(state of energy, SoE)的精确估计至关重要。
传统荷电状态(state of charge, SoC)估计考虑的是电池容量维度的变化,与工作电流变化线性相关;而SoE同时与电流和电压的变化有关,体现了电池能量维度的变化。因此SoE估计更能反映电池的实际能量供应状态,然而当前对此的研究并不多。在SoE的估计方法中,应用广泛的是功率积分法。但该方法的精度容易受到电流、电压漂移的影响,需要定期进行校准,因此不适合高精度的在线估计。随着学术界对该领域的研究持续深入,估计方法也越发丰富,大致可分为基于数据驱动的方法和基于滤波的方法。基于数据驱动的方法通常有支持向量机(SVM)和长短期记忆网络(LSTM)等,此类方法非线性拟合能力较强,但依赖于高质量的训练数据集,并且容易发生过拟合现象,泛用性较差。
与之不同的是,基于滤波的方法对数据要求较低,计算较为简单,是一种更加实用的SoE在线估计方法。该类方法主要有卡尔曼滤波类算法和粒子滤波(particle filter, PF)类算法。针对强非线性的锂电池系统,文献[9]使用扩展卡尔曼滤波(extended Kalman filter, EKF)进行SoE估计。对于EKF中省略高阶项带来的处理误差,文献[10]和文献[11]分别使用无迹卡尔曼滤波(unscented Kalman filter, UKF)和容积卡尔曼滤波(cubature Kalman filter, CKF)进行估计,进一步提升了估计精度。在面对高斯干扰时,文献[12]使用Sage-Husa自适应扩展卡尔曼滤波实时更新协方差矩阵,解决了过程噪声和测量噪声使算法精度降低的问题。此外,文献[13]基于一阶RC等效电路模型,将基于滤波和基于数据驱动的方法结合起来,采用模型预测滤波算法估计电池的SoE,并使用改进反向传播神经网络(BPNN)对估计结果进行误差补偿。以上这些方法虽然取得了不错的估计精度,但都是假设系统在高斯噪声环境下实现的,而在容易产生带有厚长拖尾特性的非高斯噪声的实际应用场景下,其估计精度的鲁棒性并未得到明显改善。
针对上述问题,本工作基于CKF,引入信息熵理论,采用最大相关熵准则(maximum correntropy criterion,MCC)代替原有的最小均方误差准则,提出基于改进学生t核最大相关熵容积卡尔曼滤波(improved maximum correntropy cubature Kalman filter based on student's t kernel,ITMCCKF)的锂电池SoE估计方法。在二阶RC等效电路模型的基础上进行参数辨识,结合相关熵对算法进行推导,基于动态工况进行非高斯噪声下的算法对比验证和结果分析。
1 电池模型及参数辨识
1.1二阶RC等效电路模型
等效电路模型可以很好地模拟电池充放电的动、静态特性,具有较高的精度和计算效率等优点,在实验研究中得到了广泛的应用。考虑在计算精度和计算复杂度之间进行权衡,本工作采用二阶RC等效电路模型来模拟电池极化效应导致的瞬时压降和电压松弛现象,如图1所示。
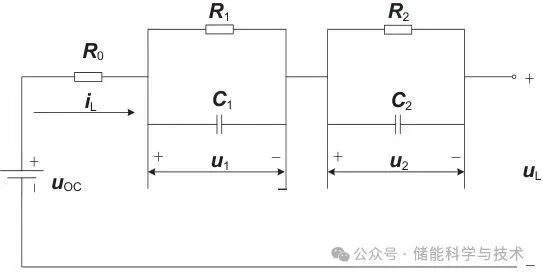
图1 等效电路模型
根据基尔霍夫定律,该等效电路的微分方程为
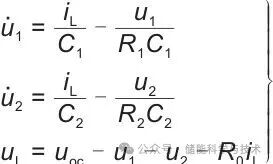 | (1) |
式中, 、
、 分别为电化学极化电压和浓差极化电压;
分别为电化学极化电压和浓差极化电压; 、
、 分别为电化学极化电阻和浓差极化电阻;
分别为电化学极化电阻和浓差极化电阻; 、
、 分别为电化学极化电容和浓差极化电容;
分别为电化学极化电容和浓差极化电容; 为电池内阻;
为电池内阻; 为开路电压;
为开路电压; 为端电压;
为端电压; 为电流。其中,
为电流。其中, 、
、 、
、 、
、 、
、 为待辨识参数。
为待辨识参数。
电池SoE定义为剩余能量与总可用能量的比值,与电流和端电压有关,表达式为
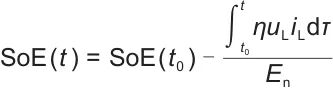 | (2) |
式中, 为最大可用能量,与电池使用寿命和温度有关;
为最大可用能量,与电池使用寿命和温度有关; 为库仑效率。
为库仑效率。
将式(1)和式(2)离散化可得到电池系统的状态方程和观测方程为
 | (3) |
 | (4) |
式中, 为采样时间;
为采样时间; 和
和 为高斯白噪声。
为高斯白噪声。
1.2参数辨识
模型参数辨识精度将直接影响SoE估计精度,本工作选取沙猫群优化(sand cat swarm optimization,SCSO)算法辨识模型参数。SCSO算法仅通过搜索和攻击猎物2个阶段即可完成寻优,相较于其他启发式搜索算法,该算法参数调节少,计算过程简单,且收敛速度快,适应性强。设置目标个体为 ,适应度函数为实际测量端电压和模型预测端电压的均方差误差,表达式为
,适应度函数为实际测量端电压和模型预测端电压的均方差误差,表达式为
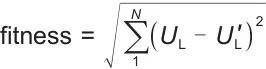 | (5) |
式中, 和
和 分别表示测量端电压和预测端电压。
分别表示测量端电压和预测端电压。
SCSO参数辨识步骤如下所示:
1)初始化。设置沙猫种群规模为50,问题维度为5,最大迭代次数为100。在设定的搜索空间随机产生沙猫个体,初始化方式如下式:
 | (6) |
式中, ;
; ;
; 表示沙猫的位置;
表示沙猫的位置; 和
和 分别为目标个体的上下界;
分别为目标个体的上下界; 为0~1的随机数。
为0~1的随机数。
2)基础参数设置。
 | (7) |
 | (8) |
 | (9) |
式中, 为控制搜索猎物阶段转向攻击猎物阶段的参数;
为控制搜索猎物阶段转向攻击猎物阶段的参数; 为沙猫的灵敏度范围;
为沙猫的灵敏度范围; 为听觉特征,其值为2;
为听觉特征,其值为2; 为当前迭代次数;
为当前迭代次数; 为最大迭代次数;
为最大迭代次数; 表示不同沙猫的灵敏度,以避免陷入局部最优。
表示不同沙猫的灵敏度,以避免陷入局部最优。
3)搜索猎物阶段。当 时,每只沙猫根据当前位置
时,每只沙猫根据当前位置 、当前种群最佳位置
、当前种群最佳位置 和灵敏度范围
和灵敏度范围 来调整自己的位置,以达到搜寻猎物的目的,位置更新方式如下:
来调整自己的位置,以达到搜寻猎物的目的,位置更新方式如下:
 | (10) |
4)攻击猎物阶段。当 时,沙猫群开始攻击猎物。首先根据个体最优位置
时,沙猫群开始攻击猎物。首先根据个体最优位置 和个体当前位置
和个体当前位置 生成一个随机位置
生成一个随机位置 ,然后为每只沙猫随机选择一个角度以实现沙猫群360°攻击猎物,位置更新方式如下:
,然后为每只沙猫随机选择一个角度以实现沙猫群360°攻击猎物,位置更新方式如下:
 | (11) |
 | (12) |
通过以最小化适应度函数为目标完成以上搜寻过程,可以得到最佳的沙猫位置,即模型参数的最佳辨识值。以常温下FUDS工况数据为例,使用SCSO进行参数辨识,得到的辨识结果如图2所示。在辨识初期参数变化较为剧烈,但是可以发现经过10次少量迭代后,辨识参数开始稳定下来。将参数辨识结果 代入二阶RC等效电路模型进行模型验证,通过计算得到端电压预测的平均绝对误差仅为0.0073 mV,均方根误差仅为0.0184 mV,验证了参数辨识结果的准确性。
代入二阶RC等效电路模型进行模型验证,通过计算得到端电压预测的平均绝对误差仅为0.0073 mV,均方根误差仅为0.0184 mV,验证了参数辨识结果的准确性。
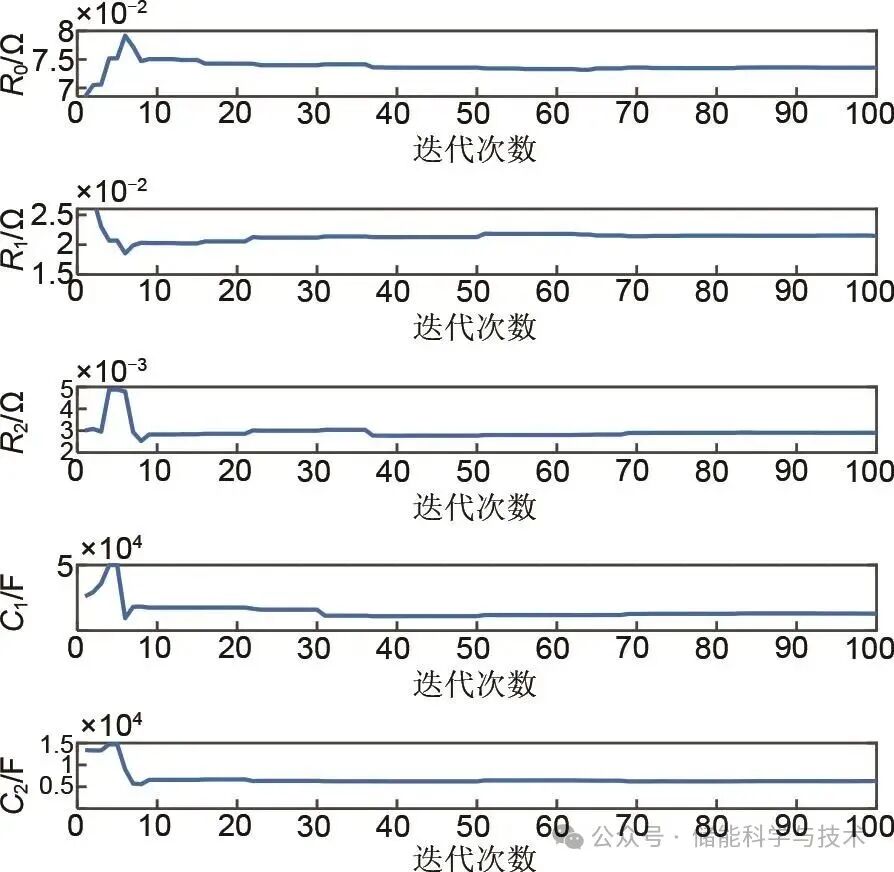
图2 参数辨识结果
2 基于改进最大相关熵容积卡尔曼滤波的电池SoE估计
在实际应用中,由于系统的不确定性,电池管理系统具有服从非高斯分布的不可靠电流或电压传感器误差信号而产生的异常值,针对这些异常值导致传统卡尔曼滤波估计效果下降的问题,而相关熵包含了误差的二阶矩及高阶矩信息,并且对较大异常值不敏感,因此可以使用最大相关熵准则代替原有的最小均方误差准则,加入到CKF中推导出最大相关熵容积卡尔曼滤波,来提高非高斯噪声环境下算法的鲁棒性和估计精度。
相关熵可衡量2个随机变量X和Y的相似性,最大相关熵准则即从给定数据集中学习,以获得使相关熵达到最大值的最优参数。相关熵定义为
 | (13) |
式中, 表示数学期望;
表示数学期望; 表示正定Mercer核函数,是常用的高斯核函数。
表示正定Mercer核函数,是常用的高斯核函数。
最大相关熵准则下滤波算法的性能主要取决于核函数的类型和核宽度的选取。学生t核函数是一种相较于高斯核函数具有更好的厚尾模拟特性的核函数,其表达式为
 | (14) |
式中, 为形状参数;
为形状参数; 为核宽度。
为核宽度。
通过控制 的大小来改变分布的形状,可以表征不同程度的厚尾噪声分布,
的大小来改变分布的形状,可以表征不同程度的厚尾噪声分布, 越小,学生t核函数越尾部特性越明显;
越小,学生t核函数越尾部特性越明显; 越大,学生t核函数越趋向于高斯核函数。充分利用这一特点可以灵活地捕捉噪声的统计特性,因此本工作用学生t核函数替代高斯核函数进行熵值计算,以提高状态估计精度。
越大,学生t核函数越趋向于高斯核函数。充分利用这一特点可以灵活地捕捉噪声的统计特性,因此本工作用学生t核函数替代高斯核函数进行熵值计算,以提高状态估计精度。
设置系统状态为 ,系统观测量为
,系统观测量为 ;根据式(3)、式(4)建立的状态空间方程,锂电池的非线性系统可描述为
;根据式(3)、式(4)建立的状态空间方程,锂电池的非线性系统可描述为
 | (15) |
式中, 和
和 分别表示系统的状态转移函数和观测函数。
分别表示系统的状态转移函数和观测函数。
与传统卡尔曼滤波一样,本节的算法过程分为时间更新和量测更新2个部分,主要是对原有的先验误差协方差矩阵和量测噪声协方差矩阵进行MCC下的加权修改,算法推导过程如下:
(1)时间更新
1)容积采样点生成和传播:
 | (16) |
 | (17) |
式中, ,
, 为状态维数;
为状态维数; ,
, 表示
表示 维单位球面与坐标轴的第
维单位球面与坐标轴的第 个交点坐标;
个交点坐标; 为误差协方差矩阵
为误差协方差矩阵 经Cholesky分解的平方根因子。
经Cholesky分解的平方根因子。
2)系统状态预测量和先验误差协方差矩阵计算:
 | (18) |
 | (19) |
3)容积点更新与再次传播:
 | (20) |
 | (21) |
式中, 为先验误差协方差矩阵
为先验误差协方差矩阵 经Cholesky分解的平方根因子。
经Cholesky分解的平方根因子。
4)观测预测量和误差协方差矩阵计算:
 | (22) |
 | (23) |
伪测量矩阵 为
为
 | (24) |
(2)MCC下的量测更新
由统计误差线性传递模型和系统量测方程构建系统增广状态表达式为
 | (25) |
式中, 为单位矩阵。令误差向量
为单位矩阵。令误差向量 ,则有
,则有
 | (26) |
式(26)两边同时左乘 得到
得到
 | (27) |
式中, ;
; ;
;
 。
。
引入基于学生t核的MCC准则构建代价函数为
 | (28) |
式中, 为
为 的元素,
的元素, ;
; 为
为 的元素;
的元素; 为
为 的元素;
的元素; 为观测维数。
为观测维数。
状态的后验估计可通过极大化代价函数获得,则应对代价函数求导,即
 | (29) |
令上式等于零可解得
 | (30) |
式(30)也可表示为
 | (31) |
式中,权重矩阵
 ;
; ;
;
 。
。
式(31)是关于状态向量 的固定点方程,可通过固定点迭代得到。则状态后验估计表达式为
的固定点方程,可通过固定点迭代得到。则状态后验估计表达式为
 | (32) |
式中,
 | (33) |
在复杂环境中,误差矩阵 的状态误差分量和量测误差分量可能从属于不同分布,因此可根据学生t核函数灵活控制形状参数改变分布形状,为权重矩阵
的状态误差分量和量测误差分量可能从属于不同分布,因此可根据学生t核函数灵活控制形状参数改变分布形状,为权重矩阵 的熵值计算配置多个形状和核宽度。多核参数的计算方法的表达式如下:
的熵值计算配置多个形状和核宽度。多核参数的计算方法的表达式如下:
 | (34) |
学生t核函数的形状参数 和核宽度
和核宽度 决定了算法在非高斯噪声条件下的估计精度。在非高斯噪声环境下,应选择合适的形状参数以表征不同非高斯噪声的厚尾程度,选择较小的核宽度以捕获误差的高阶矩信息[17],实现状态的高精度估计。后验误差协方差矩阵更新为:
决定了算法在非高斯噪声条件下的估计精度。在非高斯噪声环境下,应选择合适的形状参数以表征不同非高斯噪声的厚尾程度,选择较小的核宽度以捕获误差的高阶矩信息[17],实现状态的高精度估计。后验误差协方差矩阵更新为:
 | (35) |
ITMCCKF算法的具体步骤如下:
1)初始化 、
、 。
。
2)根据容积点规则,求式(16)~式(19)的先验状态预测量 和先验误差协方差矩阵
和先验误差协方差矩阵 。
。
3)容积点二次更新传播后,根据式(22)~式(24)求观测预测量 和伪测量矩阵
和伪测量矩阵 。
。
4)设置t = 1和迭代初始值
 。
。
5)根据式(26)、式(32)~式(34)固定点迭代更新状态后验预测量。
6)比较当前迭代与上一次迭代的状态预测值,若满足 ,则继续执行下面的步骤;否则返回上一步骤直至满足条件为止;
,则继续执行下面的步骤;否则返回上一步骤直至满足条件为止; 设置为1×10-6。
设置为1×10-6。
7)根据式(35)更新后验误差协方差矩阵 ;令
;令 并返回步骤2)开始下一时刻预测。
并返回步骤2)开始下一时刻预测。
3 算法验证
文中锂离子电池数据来源于马里兰大学先进寿命周期工程中心(CALCE)开源实验数据集,试验平台包括18650镍钴锰酸锂三元单体锂电池、温度试验箱、Arbin BT2000电池测试仪和上位机。本工作根据联邦城市驾驶循环工况(FUDS)、高速公路运行工况(US06)和北京动态应力测试工况(BJDST)在25 ℃和0 ℃的测试数据进行算法验证。
3.1常温下非高斯噪声环境算法验证
在电池系统运行过程中,由于电池的剧烈充放电行为、通信线路的接触不良和部分电子元件的物理特性等,传感器测量得到的电流、电压信号通常带有误差,并且这些误差信号的概率密度函数一般满足非高斯分布。常见非高斯分布具有厚重的尾部和非对称特性,在电池应用中,外部电磁干扰、电子设备频繁启停等可能会带来较大的脉冲噪声干扰,从而表现出非高斯噪声的厚尾效应;同时,传输信号失真和电力系统负载变化等带来的噪声干扰还会表现出噪声分布非对称的特性。高斯混合噪声、均匀噪声、散粒噪声、拉普拉斯噪声作为常见的非高斯噪声,已经被学者用于非高斯噪声系统的算法验证。故利用上述典型非高斯噪声构建3种不同的噪声环境,以验证本工作算法在非高斯噪声环境下的有效性。
在电压和电流中分别加入非高斯噪声 ,其是由高斯混合分布产生的,形式如下:
,其是由高斯混合分布产生的,形式如下:
 | (36) |
定义环境1,添加由散粒噪声形成的过程噪声 和量测噪声
和量测噪声 ,以验证异常值干扰环境下算法的适用性,具体形式如下:
,以验证异常值干扰环境下算法的适用性,具体形式如下:
 | (37) |
 | (38) |
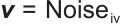
将算法结果分别与传统CKF、最大相关熵容积卡尔曼滤波(maximum correntropy cubature Kalman filter, MCCKF)、广义最大相关熵容积卡尔曼滤波(generalized maximum correntropy cubature Kalman filter, GMCCKF)结果进行对比分析。图3给出了4种算法的SoE估计结果和估计误差曲线。从图中可以看出,CKF算法估计曲线局部明显出现了较为均匀的“突刺”部分,这可能是添加了散粒噪声所导致的,而基于最大相关熵准则的各算法对这种异常值干扰起到了一定的抑制作用,因此在非高斯噪声环境下的SoE估计误差都有所降低。其中,ITMCCKF算法估计曲线局部较为平滑,整体波动较为平稳,即使初期估计误差较大,但随着迭代进行逐渐回归到真实值附近。在估计末期,由于受到电池开路电压的松弛效应和厚尾噪声影响,误差较大,而所提改进算法更接近真实值,收敛性更好。
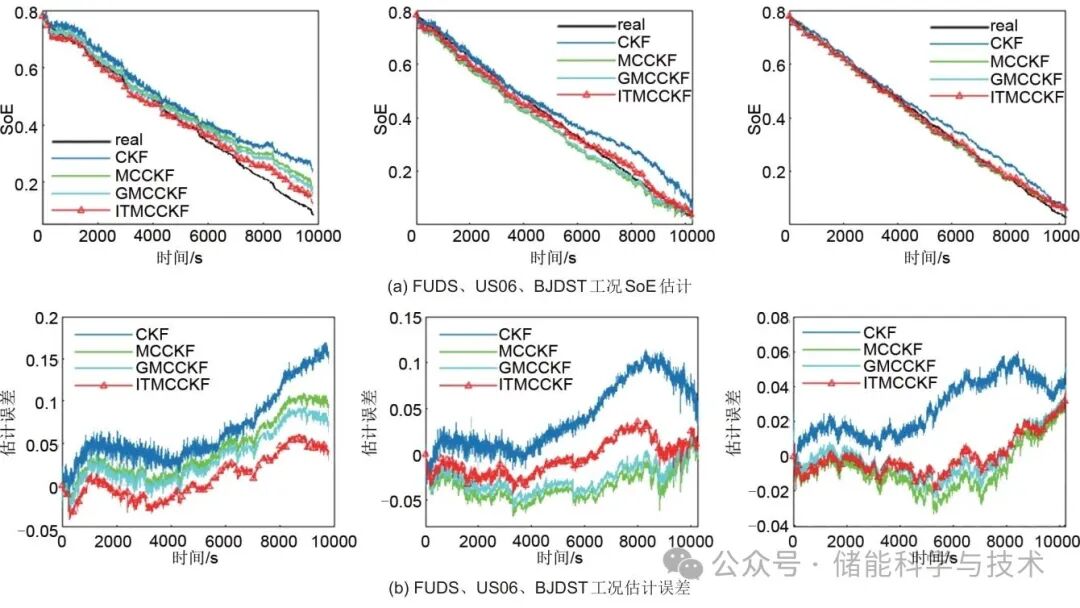
图3 环境1 SoE估计结果
为了研究不同程度噪声下改进算法的性能,定义环境2,添加由高斯噪声和均匀噪声混合的过程噪声以及不同厚尾程度的高斯混合量测噪声,其形式如下:
 | (39) |
 | (40) |
图4是环境2下各算法的估计结果。可以发现,CKF对于非高斯噪声十分敏感,在整个估计周期内剧烈波动,多个区域受到异常值干扰而表现出较大的误差极值。MCCKF和GMCCKF得益于相关熵的特性有效地降低了SoE估计误差,相较于前者,GMCCKF具有更好的非高斯噪声分布适应性,即便如此,也仅在前半阶段估计精度稍优于ITMCCKF。随着时间的推移,ITMCCKF算法的估计结果逐渐稳定在真实值附近,整体估计误差较小,并且误差曲线也更加平稳。这证明随着非高斯噪声程度的加深,所提改进算法仍能保持优异的估计性能。
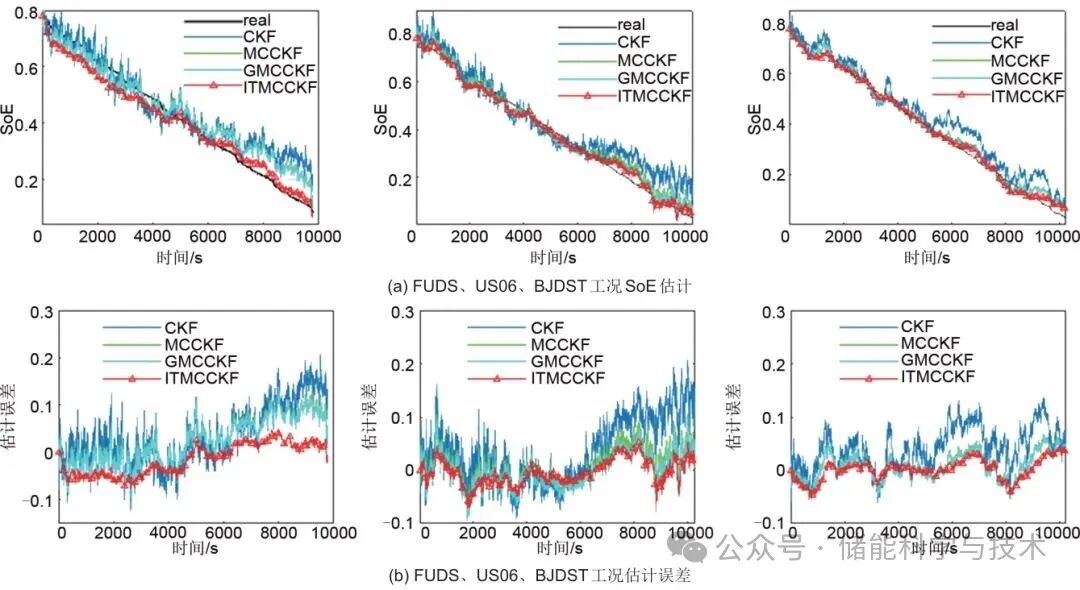
图4 环境2 SoE估计结果
进一步增加噪声种类,以研究更恶劣环境下改进算法的估计精度和鲁棒性。定义环境3,添加由不同强度的散粒噪声组成的过程噪声和拉普拉斯非高斯量测噪声,其形式如下:
 | (41) |
 | (42) |
图5是环境3下各算法估计结果,从图中可以看出,ITMCCKF算法估计效果最好,其次分别是GMCCKF、MCCKF和CKF算法。由于加入的噪声种类和程度增加,CKF估计结果较之前2种环境波动更为剧烈,估计结果全程都在真实值附近大范围上下浮动,此时传统CKF已经不适用于实际的SoE估计。尽管MCCKF和GMCCKF估计效果优于CKF,但是由于其不能很好地处理来自多种分布的非高斯噪声,估计结果离真实值偏差较大。与之相反的是,ITMCCKF可以充分利用高阶信息进行对应各个误差元素的学生t核函数值计算,通过改变分布的形状和核宽度大小灵活地处理来自不同分布的非高斯过程噪声和量测噪声,从而显著提升了算法的估计精度和鲁棒性。
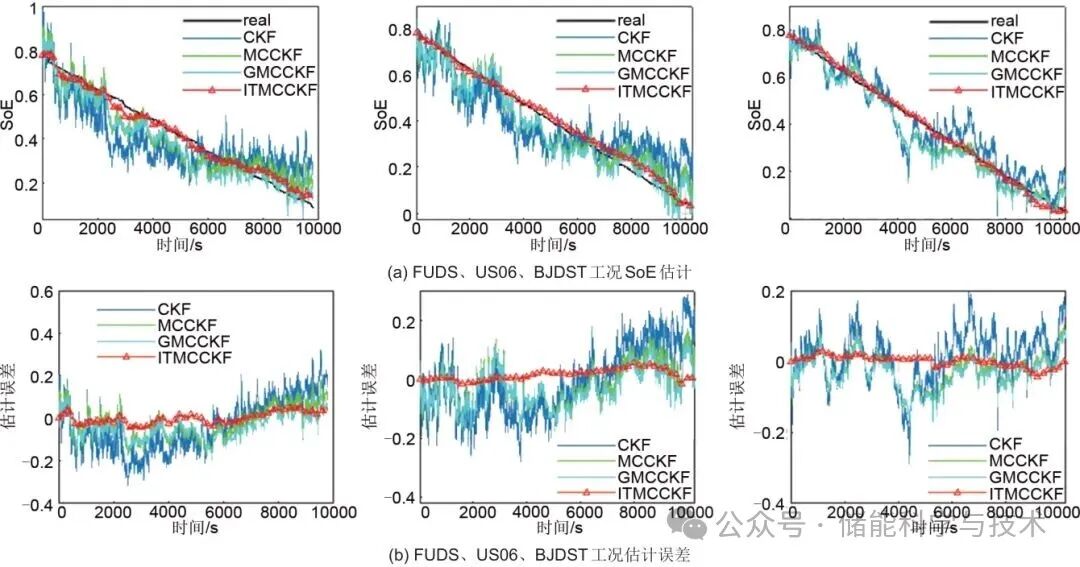
图5 环境3 SoE估计结果
为了直观地分析算法的估计精度和鲁棒性,表1给出了各算法的统计误差指标,包括平均绝对误差(mean absolute error, MAE)和均方根误差(root mean square error, RMSE)。由表1可以看出,ITMCCKF算法在各工况不同非高斯噪声环境下均取得了较好的SoE估计精度。具体来说,在FUDS、US06、BJDST工况下,ITMCCKF算法在3种噪声环境下的平均RMSE相较于CKF算法分别降低了70.8%、72.6%、72.0%;相较于MCCKF算法分别降低了50.2%、53.8%、52.8%;相较于GMCCKF算法分别降低了46.1%、48.6%、50.5%。随着非高斯噪声程度的加深和种类的增多,ITMCCKF算法始终保持着较低的SoE估计误差,验证了所提算法的有效性。
表1 SoE估计误差统计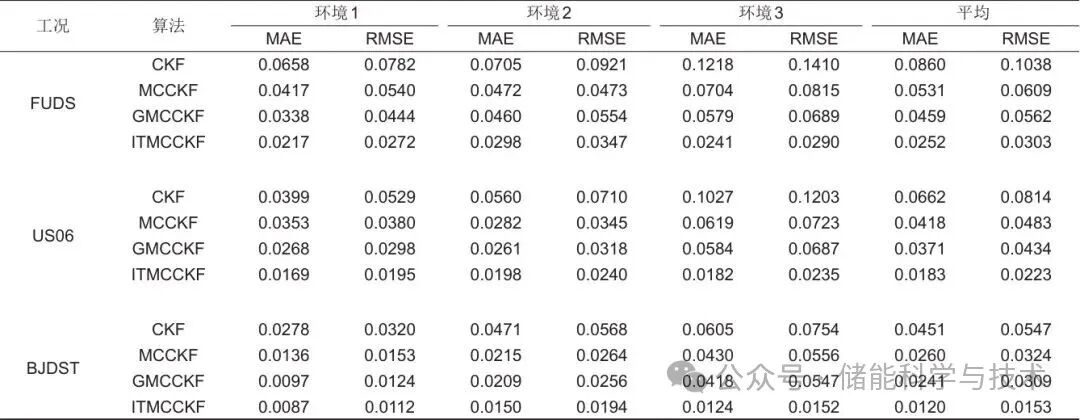
3.20℃时非高斯噪声环境的算法验证
在低温时,锂电池内部锂活性较低,化学反应较为缓慢,电池最大可用能量将下降,精准的SoE估计难度增加。为验证算法在低温环境下的适用性,在0 ℃下进行非高斯噪声环境的算法验证,实验结果在图6~图8中呈现。
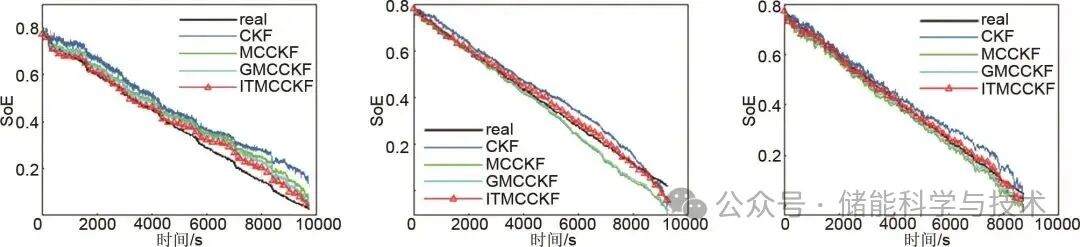
图6 0℃环境1的FUDS、US06、BJDST工况SoE估计结果
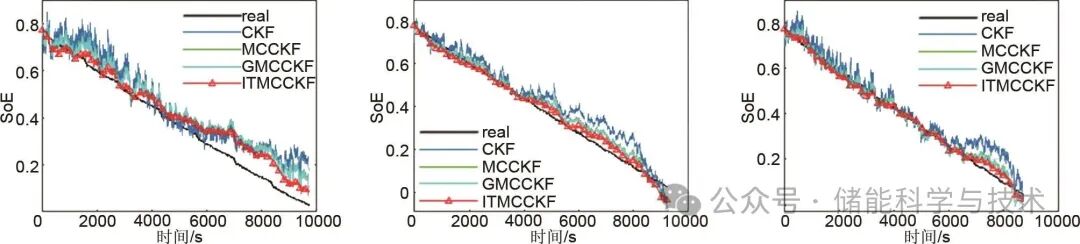
图7 0℃环境2的FUDS、US06、BJDST工况SoE估计结果
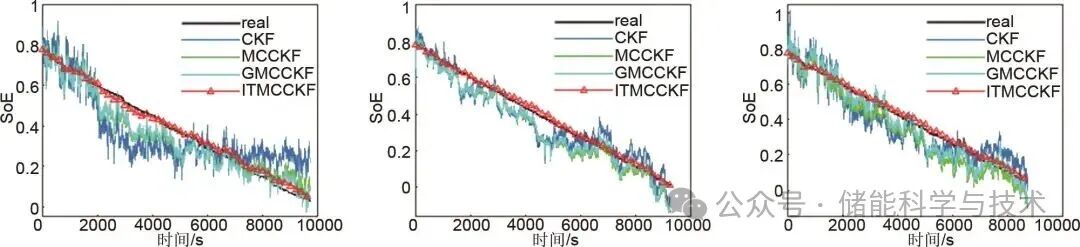
图8 0℃环境3的FUDS、US06、BJDST工况SoE估计结果
从图6中可以看出,在0 ℃时ITMCCKF算法SoE估计曲线与真实值有较高的契合度,随着非高斯噪声的持续作用,可以取得比同类算法更好的估计精度,最后较准确地收敛至真实值附近。从图7和图8中可以看出,GMCCKF算法的SoE估计曲线基本接近MCCKF算法,这表明该算法在低温下的适用性较差。由于后半阶段化学反应速率下降,电池内部状态逐渐趋于不稳定,加上较恶劣的噪声干扰,CKF、MCCKF、GMCCKF算法估计误差增大。而ITMCCKF算法在低温条件下可以同常温条件一样精准处理服从不同分布特性的非高斯噪声,因此可以保持较好的估计结果。这验证了ITMCCKF算法在低温且非高斯噪声环境下的普适性。
为了定量分析算法的估计性能,表2给出了各算法的统计误差指标MAE和RMSE。
表2 0℃时SoE估计误差统计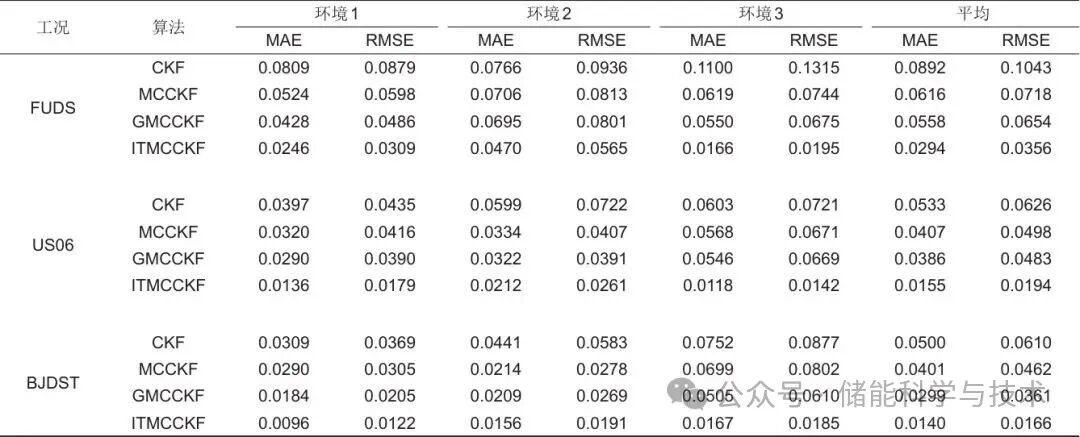
由表2可以得出,在0 ℃时的FUDS、US06、BJDST工况下,ITMCCKF算法在3种噪声环境下的平均RMSE相较于CKF算法分别降低了65.9%、69.0%、72.8%;相较于MCCKF算法分别降低了50.4%、61.0%、64.1%;相较于GMCCKF算法分别降低了45.6%、59.8%、54.0%。结果表明,ITMCCKF算法在各工况下的精度指标都有较大提升,在较低温度的非高斯噪声环境下仍可以保持SoE估计结果的精确性和鲁棒性。
4 结论
传统锂电池SoE估计研究通常假设电池运行于高斯噪声环境中,从而可以得到比较令人满意的估计精度。而实际上,面对非高斯噪声环境,算法估计的精度和鲁棒性都可能显著下降。为解决该问题,本工作结合最大相关熵准则和容积卡尔曼滤波理论,采用学生t核函数代替传统高斯核函数和多核参数等改进策略,提出了基于改进学生t核最大相关熵容积卡尔曼滤波估计方法,实现了面向非高斯环境的电池SoE鲁棒估计。面对较大异常值干扰、不同程度非高斯噪声、多种类非高斯噪声等复杂多变的条件,相较于传统方法估计误差偏大的问题,ITMCCKF算法表现出较好的SoE估计精度和鲁棒性。此外,传统算法在环境温度变化时误差通常会增大,而ITMCCKF算法则展现出优异的适应能力,能够在低温条件下稳定工作,显著提高了电池估计的鲁棒性和适用性。
本工作算法为电池管理方法提供了一种可靠思路,未来研究将探讨其他动态工况下算法的有效性以及电池组层面的SoE鲁棒估计。


发表评论